Ich fing mit meinen Experimenten an der Wasseroberfläche an. Das Boot war gelenzt. Es hat in diesem Zustand etwa 110 g Restauftrieb. Dann habe ich 'Vollgas' gegeben, um zu sehen, ob ich das Boot mit dem Bugtiefenruder oder dem Hecktiefenruder allein an der Wasseroberfläche halten kann. Die natürliche Tendenz des Bootes ist es nämlich, bei neutraler Ruderlage von selber abzutauchen, so dass höhere Überwassergeschwindigkeiten nur mit Ruderunterstützung möglich sind.
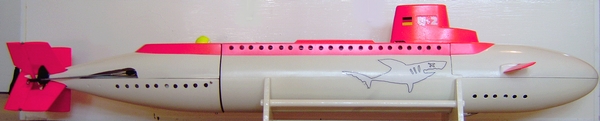
Diesen Versuch habe ich zuerst mit dem Hecktiefenruder gemacht (Bild 1). Das Boot ließ sich ohne Mühe am Abtauchen hindern, allerdings lag es im Wasser wie eine Gondel bei der der Gondoliere zu weit hinten steht und ziemlich übergewichtig ist. Das Boot pflügte mit einem erheblichen Winkel durchs Wasser – ich würde sagen, etwa 10 ° -, wobei der Bug deutlich herausschaute. Mit etwas niedrigerer Tiefenrudereinstellung war schnell ein Punkt erreicht, an dem das Boot dann doch wegtauchte.
Bild 1

Das Heckruder steht auf 'Auftauchen', das Bugtiefenruder ist neutral gestellt.
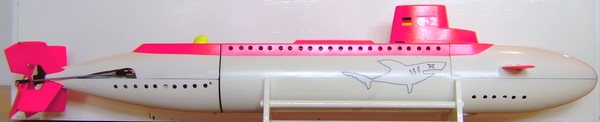
Den selben Versuch habe ich anschließend mit dem Bugtiefenruder gemacht (Bild 2). Auch hiermit konnte das Boot bei Höchstgeschwindigkeit am Abtauchen gehindert werden. Allerdings ergab sich nun ein entgegengesetztes Fahrbild zu vorher. Der Bug lag tiefer im Wasser als das Heck – ich schätze etwa 3 °. Das sah etwas besser aus, aber natürlich auch nicht optimal.
Bild 2
Das Heckruder steht neutral, das Bugtiefenruder ist auf 'Auftauchen' gestellt.
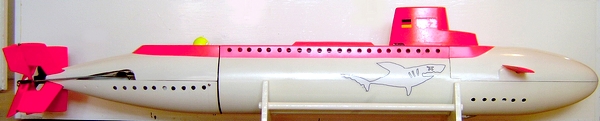
Auch mit der Einstellung wie in Bild 3 habe ich eine Probefahrt gemacht. Wie die aussah, daran kann ich mich nicht mehr erinnern. Jedenfalls gab es keinen 'Hurra'-Effekt.
Bild 3

Heck- und Bugtiefenruder stehen beide auf 'Auftauchen'.
Nun gut, das waren einfach mal ein paar Erfahrungen, die in meine spätere Entscheidung für diese oder jene Rudereinstellung einfließen sollten.
Eine weitere interessante Frage war, ob sich das aufs Schweben tarierte Boot von der Wasseroberfläche auch ohne das Austauchen des Propellers und das damit verbundene Schaumschlagen tauchen lässt.
Beim Versuch mit dem Hecktiefenruder bestand prinzipiell das Risiko des Schaumschlagens, auch wenn man das durch Geschwindigkeit und Abtauchwinkel beeinflussen konnte (Bild 4).
Bild 4
Das Heck ist auf 'Tauchen' gestellt. Das Bugtiefenruder steht neutral.
Wesentlich eleganter war jedoch das Tauchen mit dem Bugtiefenruder. Kein Schaumschlagen sondern ein müheloses Hinabgleiten war hier möglich (Bild 5).
Bild 5

Das Heckruder ist neutral gestellt. Das Bugtiefenruder steht auf 'Tauchen'.
Bild 6 zeigt eine U-Boot-typische Ruderkombination bei der Bug- und Hecktiefenruder gegensinnig miteinander gekoppelt sind. Sie zeigte den Nachteil, dass sie genauso wie beim nur per Hecktiefenruder gesteuerten Boot zum Schaumschlagen neigte.
Bild 6
Heck- und Bugtiefenruder stehen auf 'Tauchen'.
Interessenhalber wurde auch die folgende gleichsinnige Kopplung zwischen Heck- und Bugtiefenruder getestet (Bild 7).
Bild 7

Die Hecktiefenruder stehen auf 'Auftauchen', die Bugtiefenruder auf 'Tauchen'.
Diese Ruderkombination habe ich einmal in einer älteren Schrift gefunden. Sie sollte ein parallel zur Wasseroberfläche versetztes Tauchen ermöglichen. Ich habe mit verschiedenen Mischungsverhältnissen am Sender und unterschiedlichen Geschwindigkeiten versucht, dieses Ziel zu erreichen, aber es hat nicht funktioniert. Stattdessen wollte das Boot selbst bei geringem Anstellwinkel der Heckruder immer noch Auftauchen!! Erst bei minimaler Anstellung des Heckruders war wieder ein vernünftiges Steuern möglich, jetzt waren die Rudereigenschaften allerdings schon eher wieder wie bei einem reinen Bugtiefenruder-gesteuerten Boot.
Abschließend interessierte mich noch, wie das Boot mit den verschiedenen Rudermöglichkeiten bei Höchstgeschwindigkeit unter Wasser reagiert. Dabei war U2 aufs Schweben eingestellt.
Hier stellten sich am Ende nur zwei Möglichkeiten heraus. Entweder nur das Hecktiefenruder oder nur das Bugtiefenruder zu verwenden, wobei bei hohen (wie auch bei niedrigen) Geschwindigkeiten die Bugtiefenrudersteuerung vom Handling her deutlich überlegen war. Das Tiefe-halten bei maximaler Geschwindigkeit gelang mit dem Bugtiefenruder einwandfrei. Mit dem Hecktiefenruder ist das vielleicht auch möglich, aber es ist wesentlich schwieriger weil die Reaktion verzögert kommt und Erfahrung und Übung voraussetzt.
Man bemerkt hier deutlich den Vorteil der Wirkungsweise des Bugtiefenruders, welches das Boot direkt in die gewünschte Richtung steuert - beim Abtauchen also den Bug nach unten drückt. Das Hecktiefenruder bewegt erst das Heck nach oben (also entgegen der gewünschten Fahrtrichtung) und bringt damit das Boot in den gewünschten Tauchwinkel. Dazu könnte man salopp sagen, dass das einfach umständlicher ist.
Nach diesen Versuchen ist für mich klar, dass für meine U2 eine reine Bugtiefenrudersteuerung am geeignetsten ist. Die Motorisierung ist übrigens dieselbe, wie sie sie zu dem Boot im Katalog empfohlen wird. Da ich mit einem weichen Simmerring und ohne Fettfüllung im Stevenrohr arbeite und zusätzlich statt dem empfohlenen 6 V-Pb-Akku einen 7,2 V-NiCd-Akku verwende, ist meine 'SEAWOLF' eher schneller als normale 'SEAWOLFs'. Sie zischt ganz schön durchs Wasser und ich bin erstaunt, dass das Bugtiefenruder hier nicht destabilisierend ist aufgrund seiner direkten Wirkungsweise. Interessanterweise wird aber auch der Shark von Graupner nur Bugtiefenruder-gesteuert, obwohl er extrem schnell ist.
Die Erfahrungen die ich sammeln konnte und die jetzt in die U2 einfließen, müssen natürlich nicht für jedes U-Boot gelten. Ich denke da z.B. an langsame Forschungs-U-Boote, die vielleicht eine kombinierte Ruderanlage wie in Bild 6 durchaus gut vertragen können, um auch bei sehr niedrigen Geschwindigkeiten bestmögliche Tiefensteuereigenschaften zu erhalten. Das ist aber wie sooft alles Theorie: Probieren geht über studieren!
|