| MODELL-U-BOOTE.de |
Ruderanlenkungen
|
Oft denkt man sich bei einer Ruderanlenkung nicht viel, irgendwie kriegt man sie schon hin - was sollte man da falsch machen? Insbesondere bei langsamen Fahrzeugen, wie es eben U-Boote ja meistens sind, fallen kleinere konstruktive Fehler auch oft gar nicht auf. Insofern, was soll dieser Beitrag? Ich möchte denjenigen eine Grundlage schaffen, die es eben doch genauer wissen wollen und die ein eigenes U-Boot-Projekt planen.
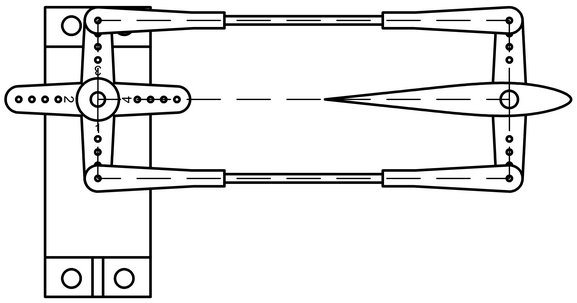
Die Bilder können durch Anklicken vergrößert werden. Bei der Auslegung einer Ruderanlenkung sind verschiedene Fehler möglich. Der wahrscheinlichste dabei ist, dass das Ruder trotz gleicher Knüppelausschläge in die eine wie die andere Richtung völlig unterschiedliche Winkelstellungen einnimmt. Für den RC-Kapitän bedeutet das, dass sein Boot sich nur schwer steuern lässt, weil die Kurvenradien auf beiden Seiten bei ansonsten gleichen Knüppelbewegungen unterschiedlich sind. Natürlich gibt es auch Anwendungsfälle, in denen diese sogenannte Differenzierung erwünscht ist. Das würde dann bedeuten, die im Folgenden genannten Ratschläge sozusagen konträr zu nutzen. Eine Standardversion der Ruderanlenkung ist in Bild 1 dargestellt. Das Servo befindet sich in seiner Neutralstellung. Seine Winkelausschläge sind in beiden Richtungen gleich. Die wirksamen Hebellängen - damit sind die Abstände zwischen den Achsmittelpunkten und den Mittelpunkten der Anschlusslöcher gemeint - von Servohorn und Ruderhebel sind ebenfalls gleich. Horn und Hebel stehen sich mit ihren jeweiligen Längen 'Achsmittelpunkt --> Anschlusslochmittelpunkt' spiegelsymmetrisch gegenüber. Die Erfüllung der beiden letzten Bedingungen, lässt sich leicht überprüfen, indem man gedanklich eine Linie durch die Drehachsen und Anschlusslöcher des Servohorns und des Ruderhebels zieht - es soll sich ein Rechteck ergeben (siehe gestrichelte Linie). Beachten wir diese Hinweise, so erreichen wir nicht nur ein symmetrisches Steuern auf beiden Ruderseiten, sondern die Ruderausschläge werden außerdem exakt denen des Servohorns entsprechen. All dies sind Grundvoraussetzungen auch für die folgenden Beispiele, es sei denn, es wird auf die Ausnahmen entsprechend hingewiesen. Bild 1 |
|
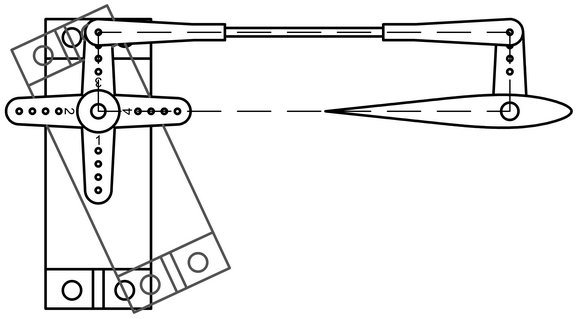
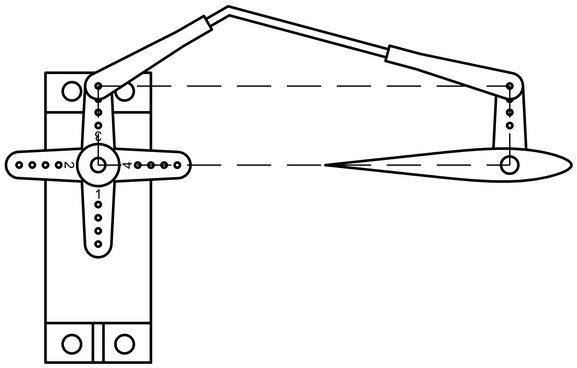
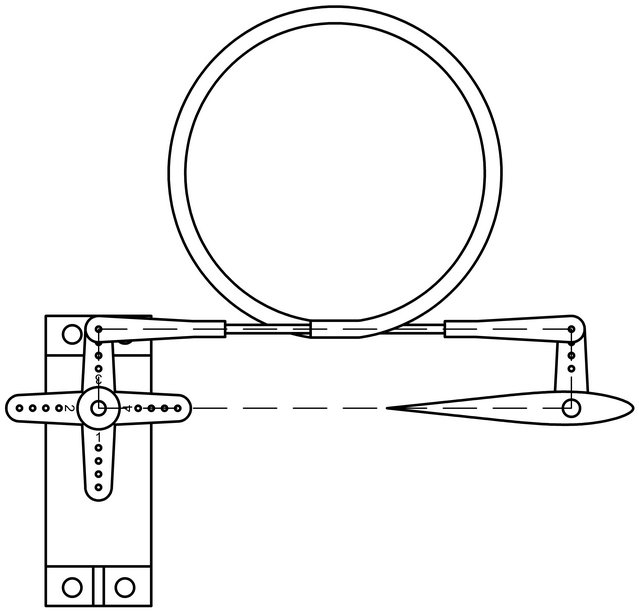
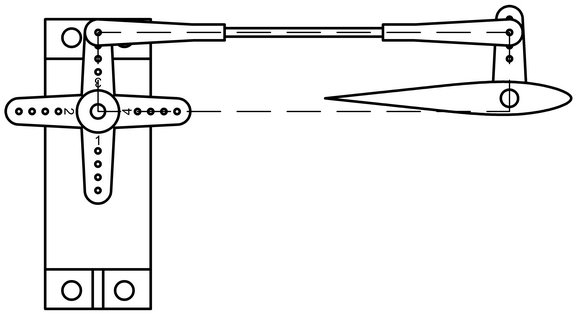
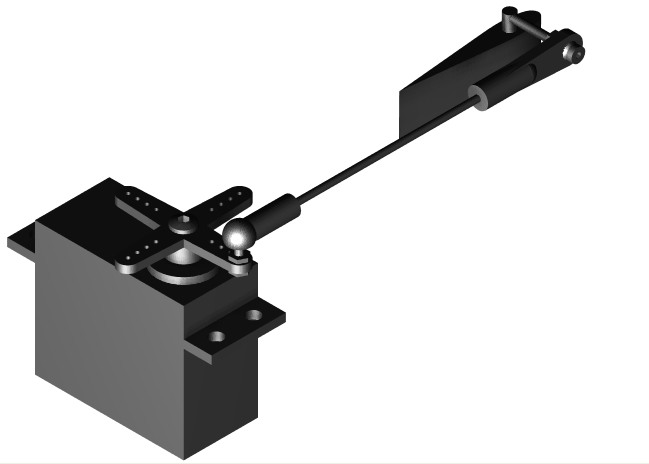
Das Gestänge sollte natürlich idealerweise auf direktem Weg geführt werden, ist aber bzgl. seiner Form oder seiner Anschlusswinkel prinzipiell nicht festgelegt (Bild 2). Man könnte es also beispielsweise auch im Bogen um ein Hindernis herumführen. Dies gilt jedoch nicht für Bowdenzüge (Bild 3). Ihre Anschlusswinkel müssen jeweils im Winkel von 90 ° zu den Hebeln liegen.
Bild 2 |
|
Bild 3
|
|
Die Orientierung des Servos selbst ist beliebig (in Bild 1 grau dargestellt). Auch das Ruderblatt muss nicht zwingenderweise im 90 °-Winkel zum Hebel stehen, wie dies in allen Zeichnungen dargestelllt ist. Beides gilt für alle in diesem Artikel vorgestellten Ruderanlenkungen. Das Servo jedoch muss vor der winkelgenauen Montage des Ruderhorns immer erst, wie bereits angedeutet, in seine Neutralstellung (= Mittelposition) gebracht werden.
Dazu schaltet man den Sender ein, schließt das Servo an den Empfänger an und stellt den entsprechenden Steuerknüppel am Sender inkl. seiner Trimmung auf neutral (= Mittelposition). Sonstige elektronische Trimmmöglichkeiten sind auf neutrale Arbeitsweise einzustellen. Das Servo wird kurz fahren, wenn es nicht schon in der Neutralstellung war. Anschließend wird der Empfänger wieder ausgeschaltet. Nun kann das Servo in beliebiger Position montiert und das Servohorn in der gewünschten Position aufgesteckt werden. Da die Abtriebsachse des Servohorns gezahnt ist, kann dieses immer nur in bestimmten Winkelschritten aufgesetzt werden. Oft lässt sich daher in der Praxis gar kein idealer Winkel erreichen, weshalb man versuchen kann, es im Montagesitz insgesamt etwas zu drehen oder besser noch, bereits während der Montage entsprechend auszurichten. Manchen Servos liegen auch Vier- oder Sechsfachhörner bei. Jedes Einzelhorn ist nummeriert und hat einen etwas anderen Winkel zur Innenzahnung, so dass man das geeignetste durch Probieren herausfinden kann. Erst wenn mechanisch die bestmögliche Einstellung gefunden ist, können die letzten Feinkorrekturen am Sender über die Trimmer im Steuerknüppel-Bedienfeld oder besser über die Servomittenverstellung (nur bei Computer-Anlagen) vorgenommen werden. Bild 4 |
|
In Fällen, in denen hohe Kräfte erforderlich sind oder in denen es auf höchste Präzision ankommt, wird oftmals die Push-Pull-Ansteuerung verwendet (Bild 4). Dabei führen nicht ein, sondern zwei Gestänge vom Servo zum Ruder. Hier ist das bisher Gesagte besonders wichtig, ansonsten resultiert es bei der Push-Pull-Ansteuerung in einer mechanischen Verspannung der Gestänge gegeneinander.
Kommen wir zurück zur Standard-Anlenkung wie in Bild 1. Ruderwinkelvergrößerungen oder -verkleinerungen (also Über- oder Untersetzungsverhältnisse) erreicht man, indem man für Servo und Ruder unterschiedliche Hebellängen wählt und -so weit machbar- beachtet, dass die Anschlusslöcher in den Hörnern möglichst im Rechteck liegen wie in Bild 5. Mit anderen Worten, die Priorität im Rechteck liegt auf den Anschlusslöchern, nicht auf den Drehachsen. Die Ruderwegdifferenzen zwischen Rechts- und Linksausschlag sind dann i.A. zu vernachlässigen und umso besser, je länger das Gestänge ist. Eine Winkelvergrößerung (großes Servohorn auf kleinen Ruderhebel) ist allerdings nur möglich, wenn wir am Servo einen recht kleinen Maximalwinkel definieren (z.B. je 20 ° zu beiden Seiten). Bild 5 |
|
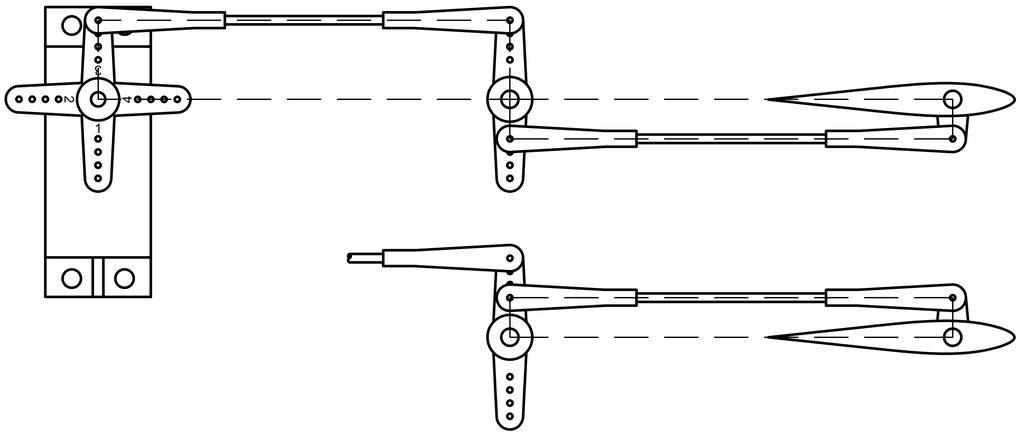
Wenn wir jedoch bei Über- oder Untersetzungen ein Ergebnis ohne die geringste Differenzierung erwarten, hilft nur ein zusätzlicher Hebel der zwischen Servo und Ruder montiert wird (Bild 6). Auch hier müssen sich gedanklich wieder Rechtecke bilden lassen. Und zwar auf der Servoseite genauso wie auf der Ruderseite.
Im unteren Teil von Bild 6 sieht man eine Variante, in der der Zwischenhebel nur auf einer Seite verwendet wird – auch das ist möglich. Zu beachten ist natürlich, dass die Ruderwirkung nachher in die richtige Richtung läuft, andererseits kann man dies auch über ein Servo-Reverse am Sender leicht erreichen. Bei einem Servo-Reverse, über das zumindest alle Mittelklasse-Fernsteuerungen verfügen, kann die Servodrehrichtung am Sender einfach umgeschaltet werden. Im Ergebnis ist die Ansteuerung per Umlenkhebel technisch aufwendiger und führt zu mehr Übertragungsspiel und Reibung als die zuvor vorgestellte Lösung, so dass ihr Vorteil der absolut gleichen Steuerwege für eine konstruktive Umsetzung i.A. nicht schwer genug wiegt. Bild 6 |
|
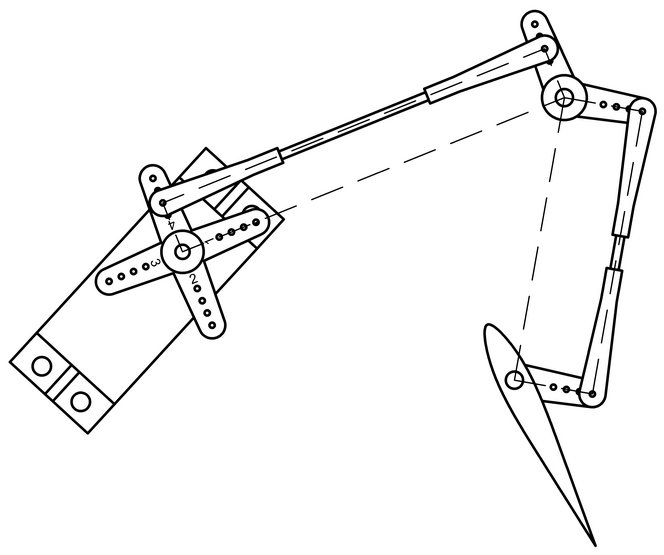
Bild 7 zeigt einen Zwischenhebel, mit dem die Wirkrichtung verändert wurde. Sein Winkel ist ohne Belang. Wichtig ist jedoch auch hier u.A., dass sich bei Neutralstellung des Servos auf beiden Seiten des Hebels ein Rechteck ergibt. In Bild 8 wurde zusätzlich noch eine Übersetzung integriert, um zu zeigen, dass auch recht unübersichtliche Ruderanlenkungen konstruktiv einwandfrei sein können. Das gedrehte Servo und das gedrehte Ruder sind bekanntlich für die Funktion der Anlenkung ohne Belang.
Bild 7 |
|
Bild 8
|
|
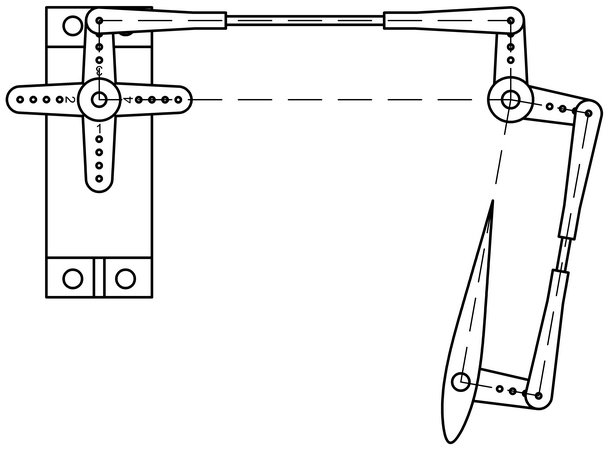
In Bild 9 ist eine um 90 ° versetzte Anlenkung zu sehen. Auf den ersten Blick wirkt dies irritierend, aber die bisher genannten Regeln gelten auch hier. Das ist leichter zu erkennen, wenn man die Ruderanlenkung um 90 ° zur Seite dreht (Bild 10).
Bild 9 |

|
Bild 10
|
|
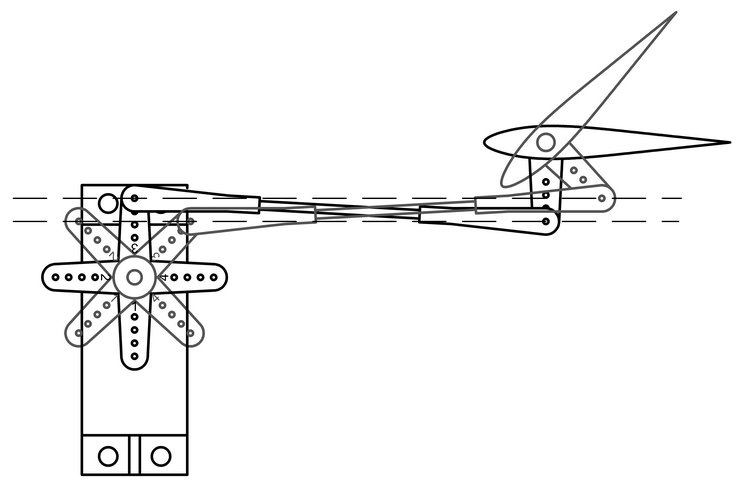
Bild 11 zeigt eine Anlenkung mit entgegengesetzten Hebeln. Voraussetzung für eine optimale Funktion (also gleichmäßiger Ruderausschlag zu beiden Seiten) ist, dass die wirksamen Längen von Horn und Hebel gleich sind und beide in Neutralstellung derart parallel zueinander stehen, dass deren Anschlusslöcher jeweils auf gleicher Höhe wie die gegenüberliegenden Anschlusslöcher bei gedachtem Vollausschlag stehen. Dadurch ergeben sich die beiden parallel liegenden unterbrochenen Linien im Bild.
Mit anderen Worten, der Ruderhebelarm soll bei Neutralstellung mit seinem Anschlussloch auf Höhe des Servohornanschlusslochs liegen, wenn dieses gedanklich in der einen oder anderen Vollausschlagposition steht. In Bild 11 ist der Übersicht halber nur die rechte Vollausschlagposition eingezeichnet, es könnte auch die linke eingezeichnet sein, das würde keinen Unterschied machen. Hier ist der tatsächliche Vollausschlag angesprochen, der von der individuellen Anwendung abhängt, es ist nicht der theoretisch mögliche Vollausschlag gemeint. Bild 11 |
|
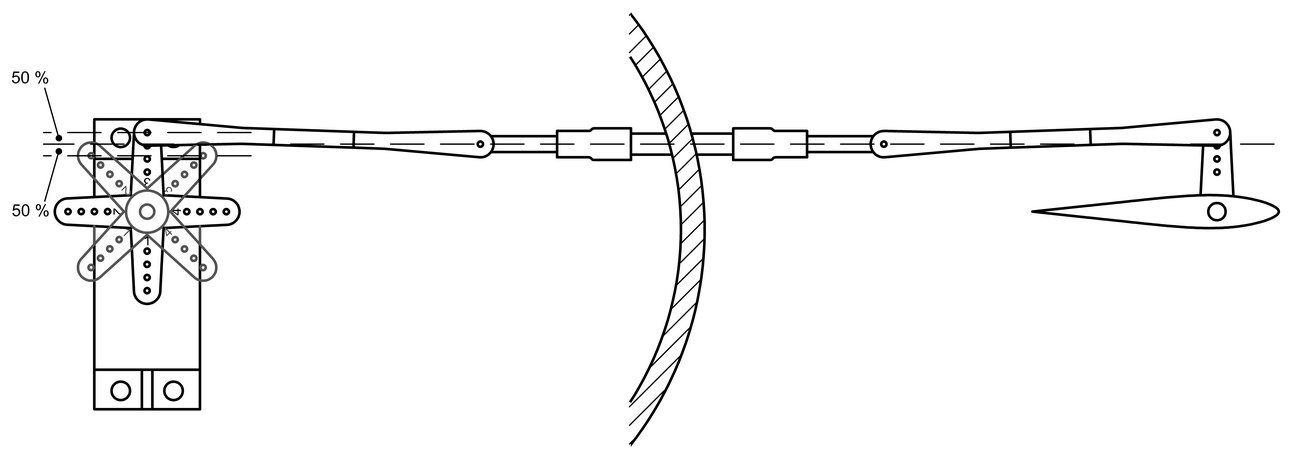
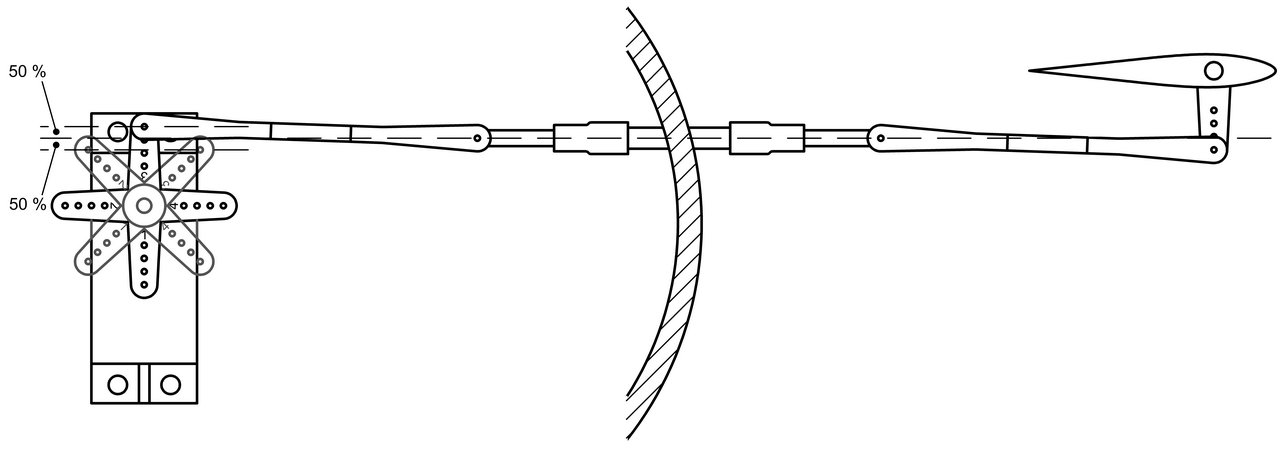
Wenn wir im U-Boot-Modellbau mit steifen Anlenkungen und steifen Rumpfdurchführungen arbeiten, dann sind Ausgleichsgestänge erforderlich, wie wir sie in Bild 12 erkennen können. Sie ermöglichen ein spannungsfreies Verfahren des durch die Dichtung führenden Gestänges.
Dabei ist zu beachten, dass die Mittelpositionen des Servohorns und des Ruderhebels sich beide auf Höhe der Rumpfdurchführung befinden. Die Mittelpositionen liegen jeweils zwischen der Neutralposition und dem Vollausschlag. Im Bild 12 ist dies nur auf der Servoseite verdeutlicht. Auf der Ruderseite soll es sich jedoch genauso verhalten. Auch hier ist mit dem Vollausschlag der tatsächliche maximale Ausschlag gemeint. Ein theoretisch möglicher Wert interessiert uns an dieser Stelle nicht. Da Horn und Hebel bzgl. Achsen und Anschlüssen in Bild 12 spiegelsymmetrisch zueinander stehen, ergibt es sich, dass in diesem Fall auch unser gedachtes Rechteck wieder anwendbar ist. Die Längen der Ausgleichsgestänge können durchaus unterschiedlich sein. Für sie gilt nur, dass sie nicht zu kurz oder besser gesagt, möglichst lang sein sollten. Das Ergebnis ist nicht hundertprozentig gleichmäßig auf beiden Ruderseiten, aber i.A. völlig ausreichend. Die Winkeldifferenz zwischen dem Rechts- und dem Linksausschlag liegt in dem hier beschriebenen Beispiel bei unter 1/10 °. Die Ausgleichsgelenke haben je 63,15 mm und die wirksame Hebellänge beträgt auf beiden Seiten 15 mm. (Anmerkg.: Als Ein- und Austritte in das Dichtungsrohr wurden hier zwei kurze Silikonschlauchstücke gezeichnet.) Bild 12 |
|
Das Ganze lässt sich genauso gut mit entgegengesetzt stehendem Hebel realisieren (Bild 13). Hier gelten praktisch dieselben Regeln; dann ist auch das Ergebnis dasselbe. Horn und Hebel stehen sich jetzt zwar nicht mehr spiegelsymmetrisch gegenüber, sie sind aber gleich lang, befinden sich in Neutralposition immer noch parallel zueinander und jeweils senkrecht zur Rumpfdurchführung. Die Mittelpositionen des Servohorns und des Ruderhebels liegen beide wieder auf Höhe der Durchführung.
Bild 13 |
|
Bei Über- oder Untersetzungen mittels der Anlenkungen in Bild 12 und 13 ist genauso wie in den entsprechenden Beschreibungen vorzugehen. Da Horn und Hebel jetzt nicht mehr gleich lang sind, sind auch deren jeweilige Mittelpositionen unterschiedlich. Darum ist hier besonders darauf zu achten, dass letztere jeweils individuell ermittelt werden, um sie somit auch individuell korrekt anordnen zu können.
Bei professionellen Anwendungen z.B. im Serienbereich empfiehlt es sich, die jeweilige Konstruktion mit einem CAD-System zu entwickeln und zu prüfen. Viel Erfolg bei deinem Projekt! |
COPYRIGHT MODELL-U-BOOTE.de