| MODELL-U-BOOTE.de |
Erfahrungen mit der Alu oder...
Ein bisschen Fahrphysik!
Ein bisschen Fahrphysik!
 |
....die Alu 1 hat mich schon Nerven gekostet: Ob es nun das Problem mit dem zu geringen Auftrieb war der mit Hilfe ausgeschäumter Bug- und Heckkappen ausgeglichen werden musste oder die überraschend schwierige Lackierung (Pinselstriche sichtbar, gelbe Farbe deckt nicht ausreichend trotz mehrmaligen Auftrags, Lackierung haftet schlecht auf der Grundierung) oder die Probleme mit den Fahreigenschaften auf die ich hier kurz näher eingehen möchte.
|
|
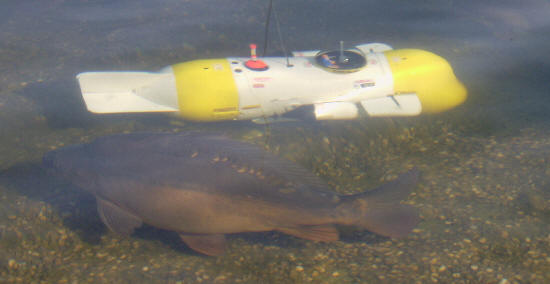
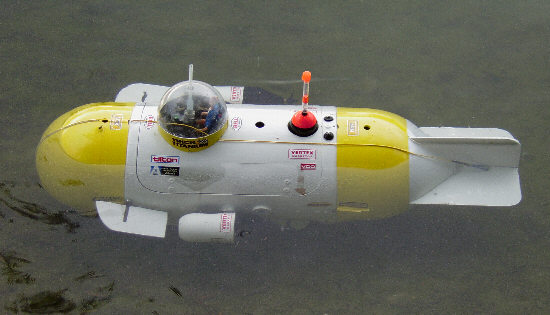
Auf dem ersten Bild oben ist die Alu auf ihrer Jungfernfahrt zu sehen (09.04.06).Die Fahreigenschaften waren ernüchternd: Die Alu ließ sich kaum richtig auf Kurs halten, und hatte sie sich einmal entschieden auszubrechen, dann war auch ein starkes Gegensteuern schon zu spät, um die Geradeausfahrt fortzusetzen.
Die Tiefensteuereigenschaften waren nicht besser. Beim Abtauchen richtete sich der Bug nach oben und das Boot geriet leicht in eine Art Taumeln und war nur schlecht steuerbar. Ich vermutete, dass dieses Fahrbild zunächst einmal vorrangig mit der schlechten Synchronisation der Motoren zusammenhing. |
 |
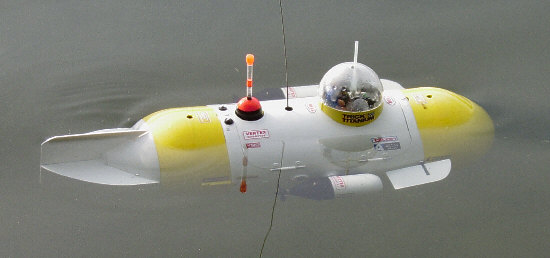
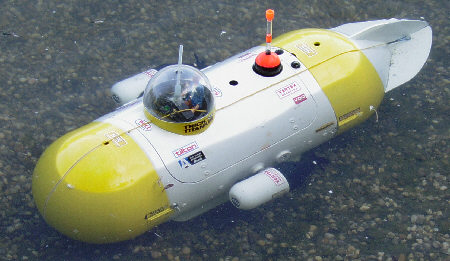
Auf diesem Foto ist die Alu bei einem Einsatz zu sehen, bei dem die Motoren senderseitig besser synchronisiert und per Exponential-Funktion auf eine feinfühligere Bedienbarkeit eingestellt worden waren (23.04.06).
Dank dieser Änderungen konnte eine deutliche Verbesserung der Fahreigenschaften erzielt werden aber es war trotzdem klar, dass ich mir noch etwas anderes einfallen lassen musste. Auf dem Feuchter U-Boottreffen am 29.04.06 war ich denn auch zugegebenermaßen etwas enttäuscht. |
 |
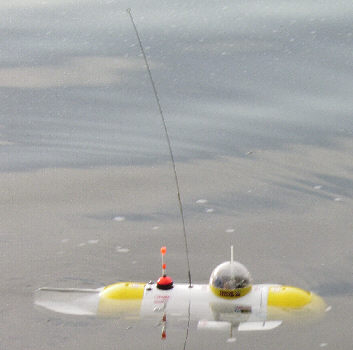
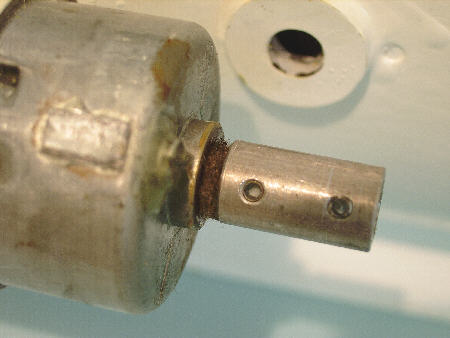
Am 20.05.06 startete ich mit der nebenstehend abgebildeten Version 2. Der Unterschied: Ich hatte am Heck ein abnehmbares Leitwerkskreuz montiert, das der Alu zusätzliche Fahrstabilität verleihen sollte. Das war gut gelungen, denn tatsächlich konnte die Alu jetzt mühelos stabil geradeaus gefahren werden.
Allerdings fiel mir diesmal eine weitere 'interessante' Eigenschaft auf. Das Boot ließ sich mit den Motorgondeln gut nach oben steuern aber nicht nach unten! Das erschien mir völlig rätselhaft. Am Anfang eines Tauchmanövers mit den etwa 45° nach unten geschwenkten Gondeln schien noch alles in Ordnung zu sein aber mit zunehmender Tiefe neigte sich das Boot mit dem Bug nach kurzer Fahrstrecke nach oben und kam tatsächlich an die Oberfläche zurück. Was war das nun wieder? |
|
Ich vermutete, dass die Motoren evt. hinter dem Schwerpunkt des Bootes lagen, was eigentlich so nicht geplant war. Dadurch hätten sie beim Abtauchen das Heck nach unten gedrückt, der Bug wäre nach oben gekommen und den Rest hätte das horizontale Leitwerk erledigt, welches das Boot zurück an die Oberfläche gelenkt hätte. Natürlich hätten sich dann auch die Auftaucheigenschaften entsprechend negativ verändern müssen und das war der Widerspruch in dieser Theorie. Außerdem stellte sich bei einer theoretischen Überprüfung heraus, dass die Motorgondeln deutlich vor und nicht hinter dem Verdrängungsschwerpunkt des Bootes lagen.
|
 |
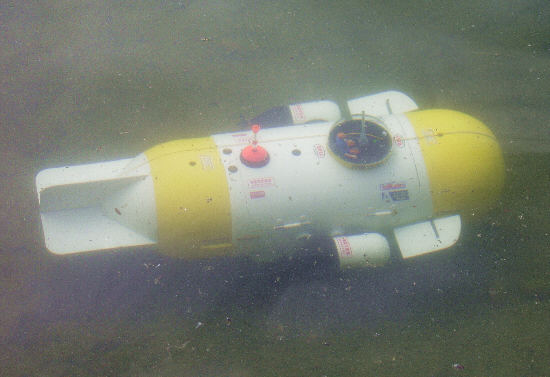
Aus den positiven Erfahrungen die ich in der Vergangenheit mit Bugtiefenrudern gemacht hatte, folgte jedoch letzten Endes mein Entschluss, eben solche nachzurüsten und die Gondeln festzusetzen. Diese Version 3 war am 04., 10. und 11.06.06 im Wasser und ist nebenstehend und auf dem nächsten Foto zu sehen.
|
 |
Wie beim Tauchgang vom 20.05.06 auch, lag die Alu stabil im Wasser, ließ sich recht gut auf konstanter Tiefe halten und hätte auch von einem Ungeübten in kurzer Zeit beherrscht werden können. Auch bei Höchstgeschwindigkeit (das Boot ist getaucht ziemlich schnell) kann beim Steuern nicht viel falsch gemacht werden. Durch die Heckflosse konnte die Alu allerdings nicht mehr auf der Stelle drehen sondern brauchte jetzt knapp drei Rumpflängen. Na ja, das war noch zu verschmerzen. Die Taucheigenschaften waren jedenfalls besser geworden - aber immer noch nicht optimal.
|
|
Das Boot reagierte zu träge auf Tauchbefehle und ließ sich ab einer bestimmten Tiefe kaum noch weiter abtauchen, die Antenne war fast nicht unter Wasser zu kriegen. Um dem zu begegnen, legte ich u.a. den Gewichtsschwerpunkt des Bootes weiter nach vorne, um das Boot absolut hotizontal auszurichten. Ich hatte es nämlich zuvor etwas hecklastig getrimmt, damit bei schneller Überwasserfahrt der Bug nicht unterschnitt und wegtauchte.
Auch diese Änderung führte jedoch nicht zu einer wesentlichen Verbesserung. Ich vermutete daraufhin, dass die horizontale Flosse einfach zu groß war und der Alu zu viel Stabilität verlieh, obwohl dies im Widerspruch zu der Beobachtung stand, dass sich das Boot beim Auftauchen optimal verhielt. |
 |
Version 4 (s. links) war am 19.06.06 an der Reihe, um zu zeigen was sie konnte. Der horizontale Flossenteil war nun flächenmäßig reduziert aber leider war das Problem mit dem Tauchen immer noch vorhanden, die Verbesserung war nur gering. Aber jetzt fiel mir endlich auf, woran es lag, denn ich konnte dieses Mal besonders deutlich beobachten, wie das Boot in geringer Tiefe geradezu ausgezeichnet auf die Tiefenruder reagierte - nur in größerer Tiefe tauchten die Schwierigkeiten auf.
|
 |
Der Verursacher war die Antenne die mit zunehmender Tiefe einen solch großen hydrodynamischen Widerstand entwickelte, dass das Boot mit Hilfe der Tiefenruder bzw. ursprünglich mit den schwenkbaren Gondeln nicht auf Tiefe gebracht werden konnte. Die Antenne sorgte dafür, dass bei Fahrt das Boot mit dem Bug nach oben gekippt wurde, und zwar um so stärker je tiefer es tauchte. Ich habe zuvor nie mit stehenden Antennen gearbeitet und kannte daher dieses Verhalten bisher nicht.
Nebenstehend sieht man die lange Stabantenne die die Alu einfach völlig überforderte, obwohl sie nur einen Millimeter dünn ist. |
|
Zwei grundsätzliche Dinge sind mir bei dem Antriebssystem mit den beiden außenliegenden schwenkbaren Gondeln aufgefallen:
|
 |
Links ist nun die Version 5 der Alu zu sehen vom 25.06.06. Sie fährt sehr stabil, so dass sie sehr einfach zu fahren ist.
|
 |
Das Horizontalleitwerk habe ich versuchsweise wieder auf die ursprüngliche Größe gebracht. Der Wendekreisradius ist mit ca. 3 Bootslängen zu groß für dieses Antriebssystem und liegt rückwärts gefahren bei etwa 1,5 Bootslängen. Wenn man geschickt abwechselnd vorwärts und rückwärts lenkt, ist das Boot fast auf dem Teller zu drehen. Die Antenne ist jetzt längs auf dem Boot verlegt.
|
 |
Eines kann ich jedoch jetzt schon sagen: Auch wenn das Boot in der jetzigen Ausführung bereits sehr beeindruckend vorgeführt werden kann, wünsche ich mir noch mehr Agilität, denn die muss bei diesem Antriebssystem einfach drin sein.
|
 |
Die wohl letzte Version der Alu (Version 6) fuhr am 09. Juli ohne Bugtiefenruder. Dafür wurden die Motorgondeln wieder schwenkbar gestaltet. Die Tiefenleitflosse wurde wieder verkleinert und diesmal zusätzlich auch die Seitenleitflosse. Ergebnis: Das Boot lässt sich nur schlecht auf Kurs halten - ob dies wirklich nur an der verringerten Leitfläche liegt oder an den nach einer Wartung evt. nicht mehr synchron laufenden Motoren, muss ich noch feststellen.
|
|
Bei Höchstgeschwindigkeit und um 45 ° abwärts geneigten Gondeln taucht das Boot wieder auf - wie gehabt - nicht jedoch bei unteren Geschwindigkeitsgraden bis ca. 80 % Fahrleistung. Wahrscheinlich weil Kuppel und Boje für ein aufrichtendes Moment sorgen. Interessant wäre daher noch ein Versuch ohne Kuppel und Boje.
Ansonsten funktioniert die reine Tiefensteuerung per Gondeln gut, aber mehr als 45 ° Abtauchwinkel sind natürlich nicht drin und das ist mir nun doch zu wenig. Eine Erweiterung auf einen Schwenkbereich von +/- 90 ° wäre möglich, aber die Gondeln sind als Hauptantrieb wegen der nachlassenden Geschwindigkeit in Kurven nur zweite Wahl. Daher lohnt ein Umbau kaum. Die Seitensteuerbarkeit im Stand ist wegen des leider unabdingbaren Leitwerks mit ca. 2,5 Bootslängen nicht optimal - wenn auch etwas besser als beim letzten Tauchversuch. Außerdem dreht das Boot im Stand recht langsam. Die Kurvenfahreigenschaften sind auch bei höherer Fahrt eher mäßig und vor allem lässt die Geschwindigkeit bei dieser Drehzahlmischung der Motoren deutlich nach. Wird unter Fahrt gelenkt, dann dreht der kurveninnere Motor zunehmend weniger und der kurvenäußere zunehmend schneller. Mit zunehmendem Einlenken polt der kurveninnere um und nimmt dann weiter an Rückwärtsdrehzahl zu. Schließlich bei voller Einlenkung und maximaler Fahrt ist der kurvenäußere Motor auf höherer Drehzahl als unter maximaler Geradeausdrehzahl und der kurveninnere ist aus (s.a. Die Wirkung des elektronischen Mixings beim zweimotorigen Antrieb). Aufgrund dieser Nachteile halte ich dieses Antriebssystem inzwischen für ungeeignet, mein Ziel zu erreichen, nämlich optimale Fahreigenschaften incl. hoher Agilität. Ein Feinschliff beispielsweise durch weitere Optimierung der Leitwerksgröße, Antriebsleistung, Vergrößerung der Gondelabstände vom Drehpunkt oder durch ein zusätzliches steuerbares Seitenruder erscheint mir letztlich leider doch immer ein Kompromiss zu bleiben. |
 |
Für den letzten Einsatz vor dem großen Umbau: Die beiden Motoren (12 V/13 W/5-pol. Anker; Typ SP 3657-50 von Conrad) wurden mit 40er Propellern ausgerüstet (vorher 35er). Die Wellen der Motoren wurden mit sogenanntem Heißwasserfett aus dem Sanitärbereich gefettet.
|
 |
Vorher war kupplungsseitig ein selbstklebender Filz befestigt den ich mit Plastilube (Harhaus) getränkt hatte. Er wurde mit Hilfe der Wellenkupplung leicht gegen das Sinterlager des Motors gepresst. Dieser Pressdruck ließ sich natürlich nur schwer bei beiden Motoren genau gleich dosieren, so dass deren Fahrleistungen im Wasser möglicherweise unterschiedlich waren und die optimale Geradeausfahrt des Bootes behinderten.
|
|
Außerdem wurde die automatische Deltamischung am Sender ausgeschaltet und stattdessen selber programmiert. Ich versprach mir davon mehr manuelle Einflussmöglichkeiten beispielsweise über die Offset-Einstellung. Wie das geht steht unter Die Wirkung des elektronischen Mixings....
...wenn Dich interessiert, wie es weiter ging, klicke hier: |
COPYRIGHT MODELL-U-BOOTE.de