| MODELL-U-BOOTE.de |
|
Der folgende Roboter wurde von einem Bekannten gebaut, der damit professionelle Bergungen durchführen wollte. Das Vorgängermodell hatte ich ihm aufgrund einer Annonce abgekauft - so haben wir uns kennen gelernt.
Zu den Details kann ich gar nicht so sehr viel sagen. Da das Vorgängermodell bereits eine Einsatztiefe von 100 m hatte, wird dieser Roboter mindestens für dieselbe Tiefe entwickelt worden sein. Der Antrieb erfolgt elektrisch, während der Greifarm (in der Fachsprache 'Manipulator' genannt) pneumatisch funktioniert. |
Um weitere Details auf den Bildern zu entdecken, kannst Du sie auch anklicken.
 |
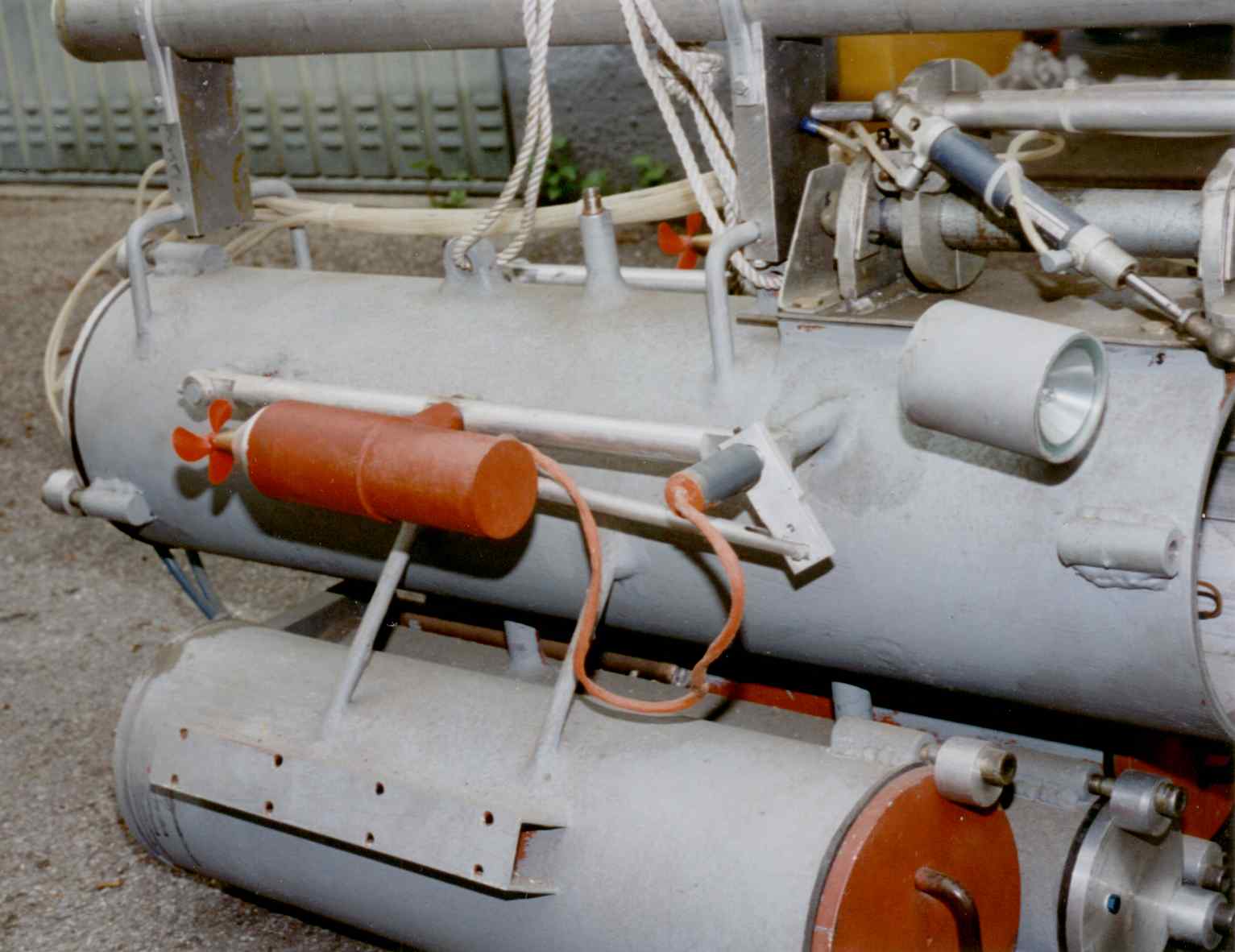
Hier sieht man vor allem die Pressluftschläuche für den Manipulator der über Pneumatikkolben angetrieben wird.
Die beiden unteren Rohre (hier ist nur das linke zu sehen) beherbergen die Akkus zur Energieversorgung des Bootes. Insbesondere die Beleuchtung schluckt normalerweise sehr viel Energie. |
 |
 |
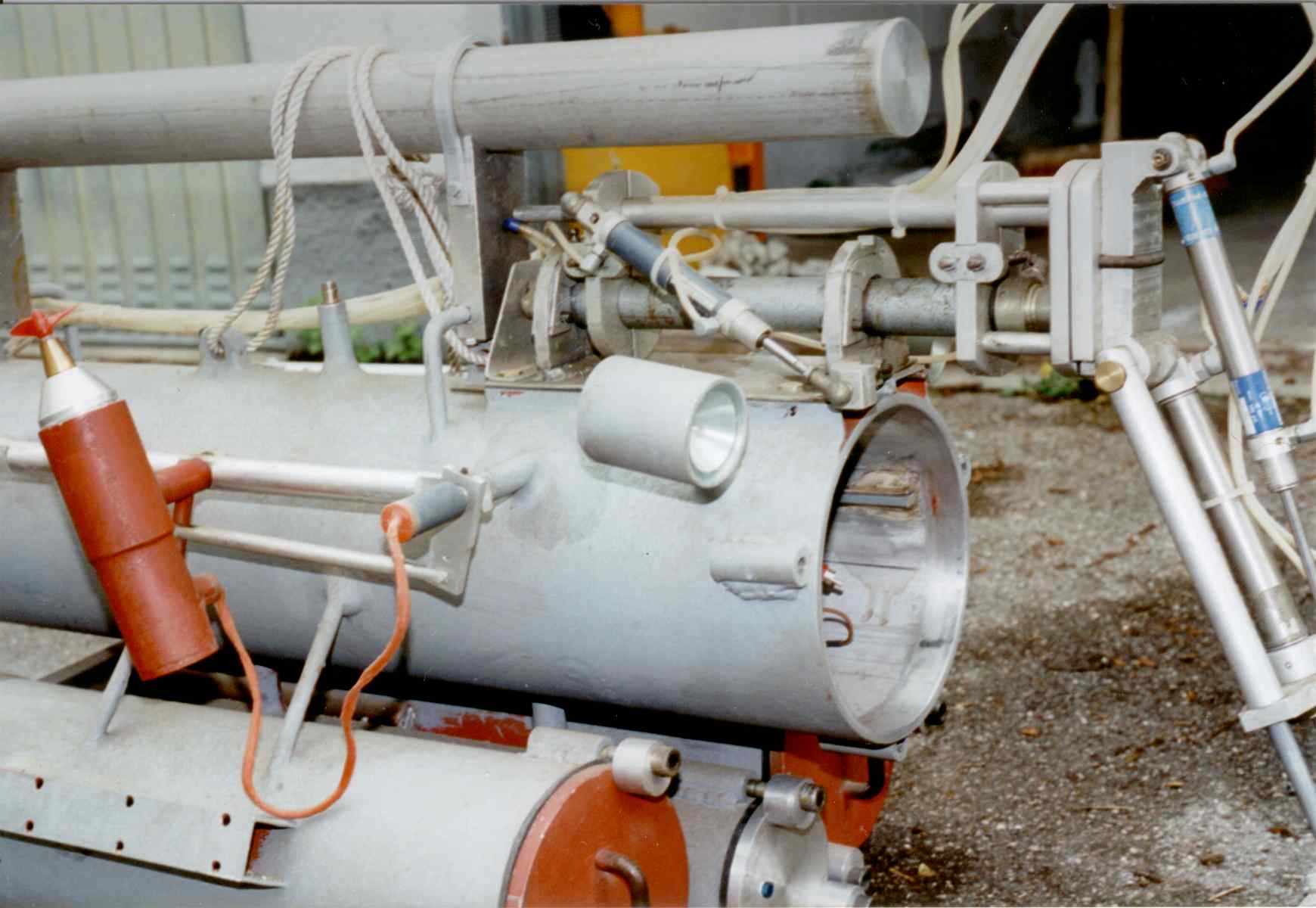
Hier sieht man die Aufhängung der schwenkbaren Antriebsgondeln rechts und links. Außerdem sind die beiden Bugscheinwerfer und ein Teil der Pneumatikmechanik des Manipulators zu erkennen.
|
 |
Dies ist noch nicht ganz die Ausgangsstellung des Greifarms. Er kann bis knapp vor den Bug zurückgezogen werden, so dass er senkrecht vor dem Bug steht.
|
 |
Hier ist vor allem auch der Bugverschluss zu sehen, der auf den folgendnen beiden Fotos im Detail gezeigt wird.
|
 |
Hinter dem Bugverschluss ist eine Kamera erkennbar.
|
 |
Der Bugverschluss von der Seite. Hier sind auch die zwei O-Ring-Einstiche zu sehen, die für die Abdichtung sorgen.
|
 |
In dieser Frontalansicht sieht man gut, dass der Manipulator weit nach aussen geschwenkt werden kann. Die Verschlusskappen aller Behälterrohre werden mit exentrisch gebohrten Scheiben gesichert.
|
 |
Wenn Du durch Anklicken das Bild vergrößerst, wird Dir im Innenraum oben die mechanische Ansteuerung der beiden Motorgondeln auffallen. Die Montageplatte für die Elektronik wird in seitlichen U-Profilen geführt.
Die im Vordergrund der Öffnung befindlichen beiden Bananenstecker und der Koaxstecker dienen der Energieversorgung der Kamera und ihrer Videosignalübertragung. |
 |
Recht gut zu erkennen, ist die Ansteuerung der rechten Antriebsgondel.
|
 |
Die Antriebsgondel wurde hier nach oben geschwenkt. Außerdem sind weitere Bestandteile des Greifarms zu sehen.
|
 |
Die Heckansicht des UW-Roboters.
|
 |
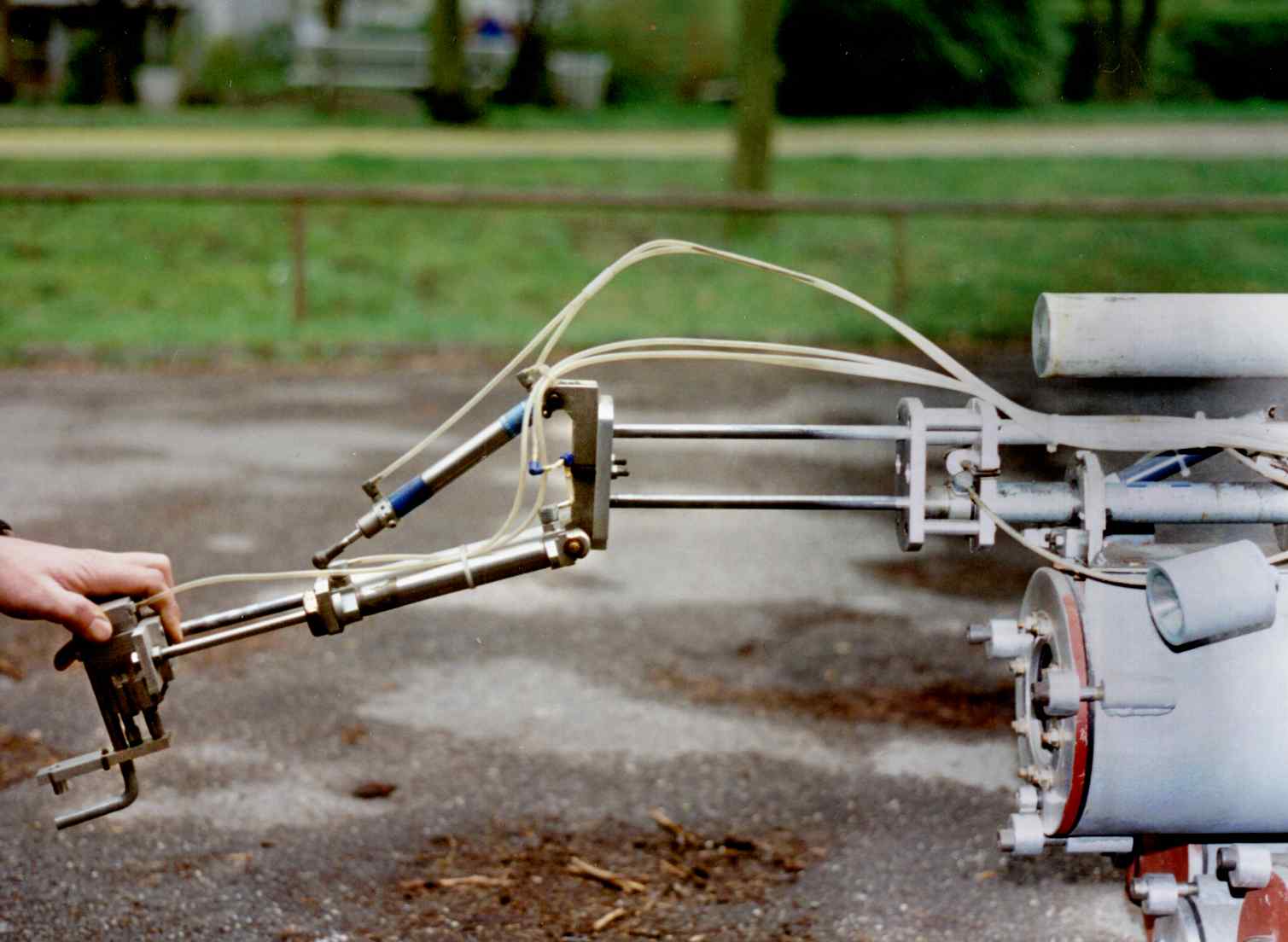
Der Greifarm kann komplett vorgefahren werden - wie hier und auf dem nächsten Bild zu sehen.
|
 |
Der vordere Bereich des Greifarms kann hoch und runter bewegt werden.
|
 |
Hier noch einmal ein Aufnahme des seitlich geschwenkten Greifarms.
|
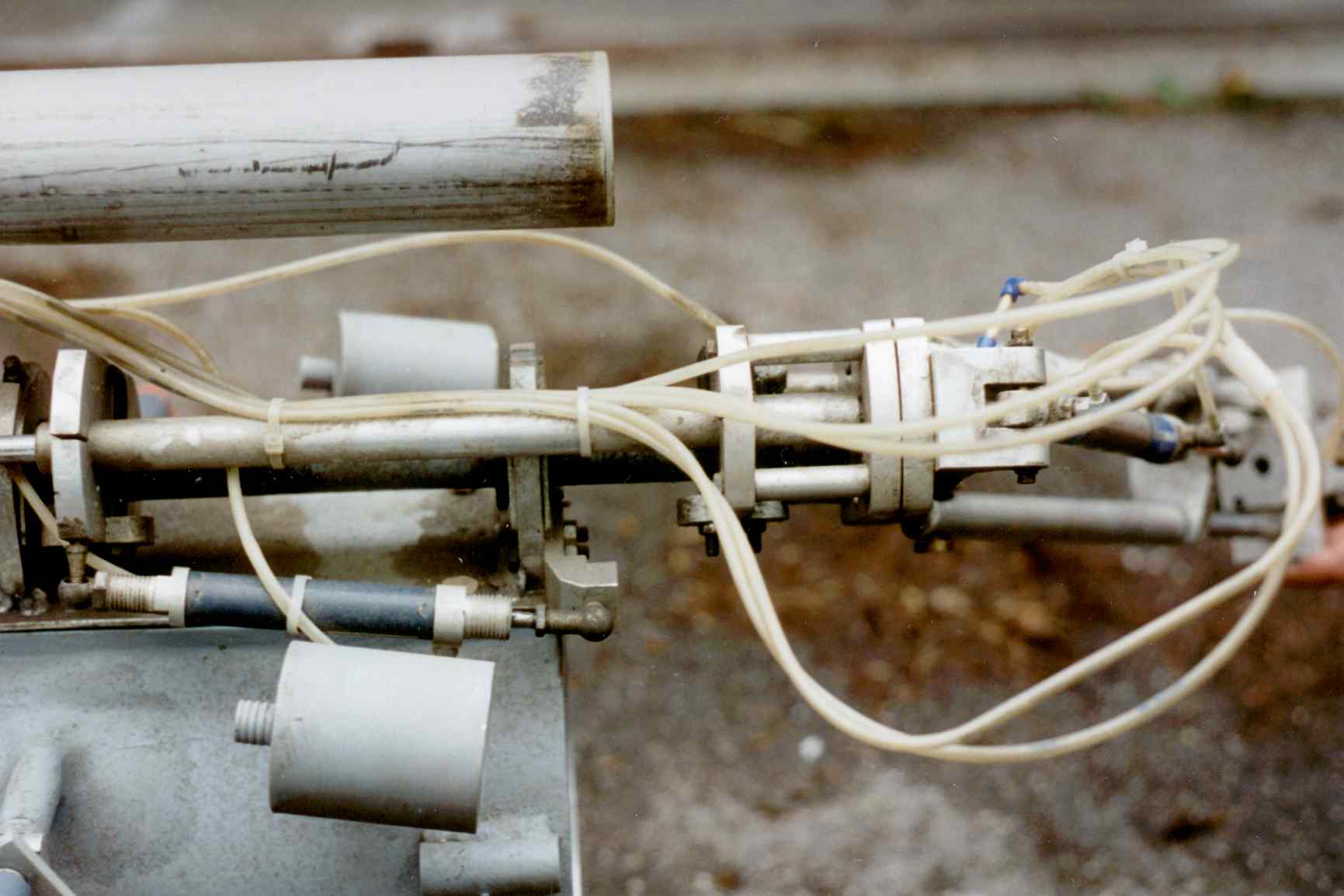 |
Hier wird der Pneumatikzylinder, der für die seitliche Schwenkbewegung zuständig ist, gezeigt.
|
 |
Derselbe Pneumatikzylinder wie zuvor, nur ausgefahren, so dass der Manipulator nach rechts geschwenkt worden ist.
|
|
Ein UW-Roboter ist ein interessantes Projekt. Mit dem Vorgänger-Modell des hier vorgestellten Typs wurde im Starnberger See eine untergegangene Segel-Yacht geborgen!
Leider habe ich das Vorgängermodell nicht mehr. In meiner damaligen Ein-Zimmer-Wohnung nahm er mir so viel Platz weg, dass ich ihn irgendwann loswerden wollte/ musste. Man muss sich das vorstellen: Da war zunächst einmal im Zentrum des Ganzen der Roboter mit einem Gesamtgewicht von etwa 50kg. Weil ich mir keinen Bruch heben wollte, hatte ich mir extra eine Sackkarre angeschafft. Außerdem lagen da 100m Kabel bestehend aus einer Koaxleitung und zwei parallel geführten Stromleitungen. Dann noch die Kamera, die Fernsteuerung, ein Elektrodenschweißgerät mit Zubehör und natürlich weiteres Werkzeug. Das reichte aber noch nicht einmal. Irgendwann wurde mir bewusst, dass ich zusätzlich noch ein Auto, ein Boot und einen Assistenten brauchen würde, wenn ich den Roboter jemals hätte fahren lassen wollen. Trotzdem, so was braucht man :-) und wenn Du einen Eigenen bauen willst, muss er ja nicht gleich so groß sein. |
COPYRIGHT MODELL-U-BOOTE.de