| MODELL-U-BOOTE.de |
Neue Erfahrungen mit der Alu












COPYRIGHT MODELL-U-BOOTE.de
|
Am 17.03.2007 war es wieder so weit. Ich hatte mir ein paar Veränderungen überlegt, um die Fahreigenschaften der Alu weiter zu verbessern.
|
|
Mit den großen Tiefenrudern lässt sich die Alu bei niedrigen Geschwindigkeiten gut steuern. Bei höheren Geschwindigkeiten wirken die Tiefenruder aber eher zu stark, so dass es schwierig ist, eine exakt horizontale Fahrt zu steuern. Unter einer Eisdecke jedoch, wo sehr behutsam gefahren wird, dürften die Tifenruder optimal sein.
|
|
Weil es ziemlich windig war, konnte die Alu getaucht nicht so gut beobachtet werden.
|
|
Die schwenkbaren Gondeln haben - das hat sich bei früheren Fahrten gezeigt - keine größere Wirkung als die Bugtiefenruder. Durch die Bugtiefenruder verspreche ich mir jedoch mehr Fahrstabilität um die Querachse. Die Gondeln dienen nur noch dem senkrechten Auf- und Abtauchen was natürlich mit den Bugtiefenrudern nicht möglich wäre.
|
|
Hier sieht man die senkrecht nach oben geschwenkten Motorgondeln. Mit ihnen geht es fahrstuhlartig und auf Wunsch mit hoher Geschwindigkeit auf- und abwärts.
|
|
Hier sind die Gondeln gerade in Aktion. Sie drücken das Boot auch mit gelenztem Tauchtank unter Wasser wenn es sein muss.
|
|
Die Heckflosse ist immer noch eine experimentelle Konstruktion. Leider haben die Ergebnisse die Erwartungen nicht erfüllt.
|
|
Die Seitenflosse ist leichtgängig in Kugellagern gelagert. Sie könnte seitlich frei hin und her schwenken wenn sie nicht durch seitliche Gummibänder gebremst wäre.
|
|
Die Gummibänder halten die Flosse solange gerade, wie keine größeren Kräfte auf die Flosse einwirken. Wenn die beiden Gondeln beispielsweise das Boot auf der Stelle drehen wollen, dann wird die Flosse durch die auftreffende Seitenströmung des Wassers komplett zur Seite geklappt.
Das Problem ist allerdings, dass es nach meiner Erfahrung keine optimale Lösung für beide Fälle (sehr gute Geradeaus-Fahrstabilität + sehr gute Seitensteuerbarkeit des Bootes) gibt, sondern nur einen bestmöglichen Kompromiss. Anfangs fuhr ich mit recht locker eingestellten Bändern. Mit dem Ergebnis, dass die Geradeaus-Fahrstabilität schlecht war, die Seitensteuerbarkeit dagegen ausgezeichnet. Bei maximaler Straffung der beiden Bänder wie oben zu sehen, war die Geradeausfahrt unmerklich besser und die Seitensteuerbarkeit allerdings merklich schlechter. Am 25.03.07 erfolgte die letzte Experimentalfahrt. Die Horizontalflosse am Heck war diesmal wieder auf das ursprüngliche Maß vergrößert. Die Seitenflosse hatte ich festgesetzt. |
|
Die Alu fährt mit den getroffenen Maßnahmen stabil - auch bei maximaler Geschwindigkeit. Die Heckflossen sind allerdings unverzichtbar. Der Nachteil der Seitenflosse ist, dass sie die Kurvenfahrt im Stand behindert. Durch entsprechendes Vorwärts-/ Rückwärts-Schalten der beiden Antriebe ist das Drehen 'auf dem Teller' jedoch trotzdem möglich.
|
|
Das bei früheren Versionen der Alu beobachtete Wegtauchen, tritt -außer bei Überwasserfahrt- nicht mehr auf. Ich führe dies zusätzlich auch auf die Vergrößerung der Bugruder zurück. Auf deren Ausschläge reagiert die Alu folgsam ohne große Verzögerung. Einige Male fuhr sie ohne auf- oder abzutauchen bei Höchstgeschwindigkeit und ohne Ruderbefehle knapp unter der Wasseroberfläche.
|
|
Ich bin inzwischen kein Freund mehr des mittig angebrachten Gondelantriebs. Aber durch die beschriebenen Zusatzmaßnahmen fährt die Alu zuverlässig, absolut anfängertauglich und ohne irgendwelche Zicken zu machen. Ich freue mich schon auf die nächsten Fahrten in tieferen Gewässern, um die Fahreigenschaften noch besser beobachten und einschätzen zu können. An meinem 'Haus'-See fahre ich bis etwa 1m tief. Mehr ist nicht möglich, wenn man nicht zu weit hinaus fahren will.
|
|
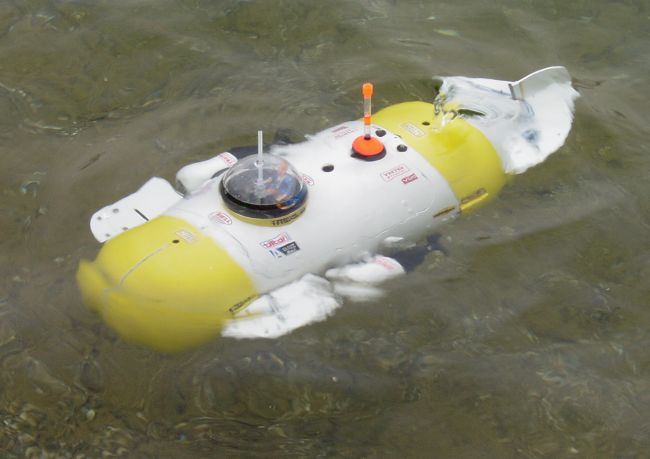
Fahrten mit herausstehendem Schnorchel sind schwierig. Ich weiß noch nicht, ob ich es mal hinkriegen werde, die Alu über eine längere Strecke so zu halten. Dieser Grenzbereich zwischen getauchtem und aufgetauchtem Zustand ist jedoch für viele Boote ein Problem.
Wenn ich noch 'mal ein Boot wie die Alu bauen sollte, dann wird es ein Seitenruder am Heck und ein Tiefenruder am Bug haben. Der Antrieb wird zentral im Heck sitzen. Seitliches Drehen auf der Stelle und senkrechtes Auf- und Abtauchen werden über fest installierte Strahlruder erfolgen. Eine solche Bauweise wäre einfacher und sinnvoller. Schön ist, dass man durch's Experimentieren viele Erfahrungen macht. Darum wage ich mich immer wieder gerne an neue und zum Teil auch ungewöhnliche Lösungen. |
COPYRIGHT MODELL-U-BOOTE.de